| 产品特性:惯导IMU | 品牌:ST意法 | 型号:LSM9DS1 |
| 传感器类型:LSM9DS1 | 传感轴:LSM9DS1 | 加速度范围:LSM9DS1 |
| 线性度:0.1% | 精度:LSM9DS1 | 系列:LSM9DS1 |
| 输出类型:LSM9DS1 | 电源电压:5V | 特性:LSM9DS1 |
| 工作温度:125℃ | 封装/外壳:LSM9DS1 | 安装类型:LSM9DS1 |
| 最小包装数:LSM9DS1 | 应用领域:测量仪器 |
LSM9DS1
iNEMO惯性模块、3D磁力计、3D加速度计、3D陀螺仪、I2C和SPI
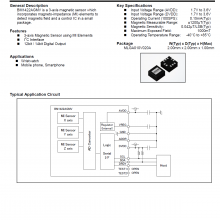
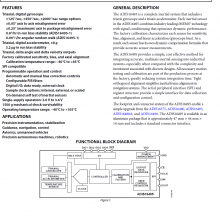
The LSM9DS1 is a system-in-package featuring a 3D digital linear acceleration sensor, a 3D digital angular rate sensor, and a 3D digital magnetic sensor. The LSM9DS1 has a linear acceleration full scale of ±2g/±4g/±8/±16 g, a magnetic field full scale of ±4/±8/±12/±16 gauss and an angular rate of ±245/±500/±2000 dps.
The LSM9DS1 includes an I2C serial bus interface supporting standard and fast mode (100 kHz and 400 kHz) and an SPI serial standard interface.
Magnetic, accelerometer and gyroscope sensing can be enabled or set in power-down mode separately for smart power management.
The LSM9DS1 is available in a plastic land grid array package (LGA) and it is guaranteed to operate over an extended temperature range from -40 °C to +85 °C.
Programmable interrupt generators
Embedded temperature sensor
Embedded FIFO
Position and motion detection functions
Click/double-click recognition
Intelligent power saving for handheld devices
ECOPACK?, RoHS and “Green” compliant
3 acceleration channels, 3 angular rate channels, 3 magnetic field channels
±2/±4/±8/±16 g linear acceleration full scale
±4/±8/±12/±16 gauss magnetic full scale
±245/±500/±2000 dps angular rate full scale
16-bit data output
SPI / I2C serial interfaces
Analog supply voltage 1.9 V to 3.6 V
“Always-on” eco power mode down to 1.9 mA
iNEMO?惯性模块是惯性测量单元(IMU),整合了补充类型的传感器,提供了比分立式MEMS产品更小巧、稳定且易于组装的解决方案。
iNEMO?系统级封装(SiP)在6轴或9轴单片式解决方案内整合了加速器、陀螺仪和磁力计。
为了在系统层面进一步节电,我们设计了iNEMO 惯性模块(内嵌机器学习内核)。MLC运行一个传感器内置的分类引擎,卸载主处理器的负荷以运行不同的任务,或者让主处理器进入睡眠状态以节电,同时内置的传感器可以识别运动数据。
多个传感器输出的集成令运动传感系统的精度达到了的应用要求,如增强的手势识别、游戏、增强实境、室内导航和基于本地化的服务
| Part Number | General Description | Marketing Status | Package | Sensing Axes | Range (g) typ | Angular Rate Range (°/s) typ | Output Type | Supply Voltage (V) min | Supply Voltage (V) typ | Supply Voltage (V) max | Angular Rate Noise Density (°/s/ √ Hz) typ | Noise Density (?g/√ Hz) typ | Current Consumption (?A) (Normal Mode) typ | Current Consumption (?A) (Low power Mode) typ |
| ASM330LHH | Automotive 6-axis inertial module: 3D accelerometer and 3D gyroscope | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | - | Digital | 2 | - | 3.6 | - | 60 | 1300 | - |
| ISM330DHCX | iNEMO inertial module with Machine Learning Core, Finite State Machine with digital output for industrial applications. | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 2000 | Digital | 1.71 | 1.8 | 3.6 | 0.005 | 60 | 700 | 32 |
| ISM330DLC | iNEMO inertial measurement unit (IMU): 3D accelerometer and 3D gyroscope with digital output for industrial applications | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 2000 | Digital | 1.71 | 1.8 | 3.6 | 0.0038 | 75 | 500 | 350 |
| LSM6DS3TR-C | iNEMO 6DoF inertial measurement unit (IMU), for entry level / mid-tier smart phones and Portable PC platforms | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 2000 | Digital | 1.71 | 1.8 | 3.6 | 0.005 | 90 | 450 | 290 |
| LSM6DSL | iNEMO 6DoF inertial measurement unit (IMU), for smart phones and battery operated IoT, Gaming, Wearable and Consumer Electronics. Ultra-low power and high accuracy | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 2000 | Digital | 1.71 | 1.8 | 3.6 | 0.004 | 80 | 450 | 290 |
| LSM6DSM | iNEMO 6DoF inertial measurement unit (IMU), for smart phones with OIS / EIS and AR/VR systems. Ultra-low power, high accuracy and stability | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 2000 | Digital | 1.71 | 1.8 | 3.6 | 0.0038 | 75 | 450 | 290 |
| LSM6DSO | iNEMO 6DoF inertial measurement unit (IMU), with advanced Digital Function, Finite State Machine. For battery operated IoT, Gaming, Wearable and Consumer Electronics. Ultra-low power and high accuracy | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 2000 | Digital | 1.71 | 1.8 | 3.6 | 0.0038 | 70 | - | - |
| LSM6DSO32 | iNEMO inertial module: always-on 3D accelerometer and 3D gyroscope | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±4; ±8; ±16; ±32 | 2000 | Digital | 1.71 | 1.8 | 3.6 | 0.0038 | 120 | - | 26 |
| LSM6DSO32X | iNEMO inertial module: always-on 3D accelerometer and 3D gyroscope | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±4; ±8; ±16; ±32 | 2000 | Digital | 1.71 | 1.8 | 3.6 | 0.0038 | 120 | - | 26 |
| LSM6DSOP | iNEMO Inertial Module: Always-on 3D Accelerometer and 3D Gyroscope | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 2000 | Digital | 1.71 | 1.8 | 3.6 | 0.0038 | - | - | - |
| LSM6DSOX | iNEMO inertial module with Machine Learning Core, Finite State Machine and advanced Digital Functions. Ultra-low power for battery operated IoT, Gaming, Wearable and Personal Electronics. | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 2000 | Digital | 1.71 | 1.8 | 3.6 | 0.0038 | 70 | - | - |
| LSM6DSR | iNEMO Inertial Module: 3D Accelerometer and 3D Gyroscope | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 4000 | Digital | 1.71 | 1.8 | 3.6 | 0.005 | 60 | 700 | - |
| LSM6DSRX | iNEMO Inertial Module with Machine Learning Core, Finite State Machine and Advanced Digital Functions for High Accuracy Applications. | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 4000 | Digital | 1.71 | 1.8 | 3.6 | 0.005 | 60 | 700 | - |
| LSM6DST | iNEMO inertial module: 3D accelerometer and 3D gyroscope | Active | VFLGA2.5X3X.86 14L P.5 L.475X.25 | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 2000 | Digital | 1.71 | 1.8 | 3.6 | 0.0034 | - | - | - |
| LSM9DS1 | 9-axis iNEMO inertial module (IMU): 3D magnetometer, 3D accelerometer, 3D gyroscope with I2C and SPI | Active | TFLGA 3.5X3X1 24L | X, Y, Z, Yaw, Pitch, Roll | ±2; ±4; ±8; ±16 | 2000 | Digital | 1.9 | - | 3.6 | - | - | 600 | - |